Using the Grabbing Tool
- DEVOPS
Analytics
The Grabbing Tool extension allows you to grab a collidable, flexible segment of a cable system.
To have a collidable flexible segment, the Collision Geometry Type of the segment or the Param Definition must be set to something other than None.
Note Only flexible segments can be grabbed. A grabbed cable will be released if it is cut. A cut cable cannot be grabbed.
To add a grabbing tool:
- Select Cable Systems from the Toolbox.
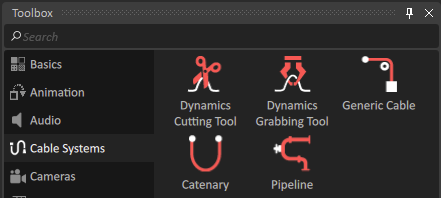
- Select Dynamics Grabbing Tool and drag it into the 3D View, or onto the desired scene/mechanism in the Explorer panel.
To allow the tool to grab segments of cable, you must fill in the following fields in the Properties panel:
- Grab: Check this box in order to enable cable grabbing.
- All of the selected grabber's collision geometries must intersect the flexible cable segment's collision geometries at the same time. See below for how to set the grabber's collision geometries.
Segment Type: Edit this field to match the segment type in the Advanced Flexible Definition section in the cable's Properties panel, for the flexible segment you wish to grab.
When you add a new grabbing tool or flexible segment, its segment type is set to "Default", making all segments available for grabbing by default. Change these values only in such cases where you need to differentiate the grabbing of specific segments from others based on material or texture.
If all these conditions are met, the Grabbed box in the Outputs section will appear checked, indicating that the cable segment is grabbed and now firmly connected to the parts containing the collision geometries.
In addition:
- Tension Start Side displays the tension (in newtons) in the cable at the grabbing site on the side toward the start of the cable.
- Tension End Side displays the tension (in newtons) in the cable at the grabbing site on the side toward the end of the cable.
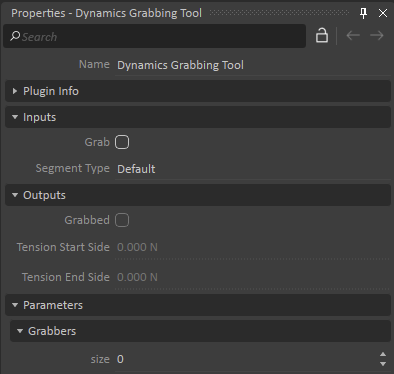
To set the collision geometries needed to register a grab:
- In the Grabbers section of the Grabbing Tool's Properties panel, change the value of Size to reflect the collision geometries that need to make contact with the flexible segment at the same time to make a grab possible.
- In each slot that appears, click the details button then
 and, in the resulting dialog box, select the desired collision geometry. The collision geometries selected can be of type Rigid Body, Sensor Touch or Sensor Contact.
and, in the resulting dialog box, select the desired collision geometry. The collision geometries selected can be of type Rigid Body, Sensor Touch or Sensor Contact.