Transforms and Euler Angles
- DEVOPS
According to Introduction to Robotics: Mechanics, and Control, Second Edition by John J Craig, orientation can be described by a set of three angles with a total of 24 different angle set conventions.
Vortex® uses a static angle set and a rotating angle set convention.
Note The default convention is the rotating angle set. In the static angle set, the convention rotates around the global static X axis, then around the global static Y axis, and, finally, around the global static Z axis.
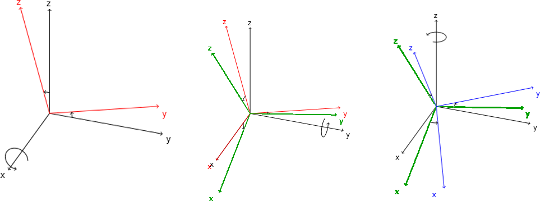
Vortex Angle Set Convention: XYZ CounterClockwise Static
The default angle set convention used by Vortex rotates around X, then around the new Y', and, finally, around the new Z''.
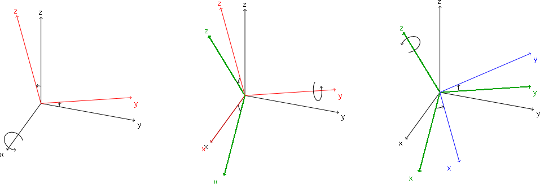
Vortex Angle Set Convention: XYZ CounterClockwise Rotating
You need to be careful with the convention with respect to quaternions. Quaternions are composed of four numbers: a directional vector, consisting of 3 components; and W, the cos half angle. The direction vector has its component in the X,Y,Z order. However, the W can be either at the beginning or the end of a quaternion. For example,
- A_Quaternion_convention(x,y,z,w) or
- Another_Quaternion_convention(w,x,y,z).